
موقعیت یابی عبارت است از تعیین موقعیت و سرعت یک جسم متحرک نسبت به یک مختصات مرجع در هر لحظه از زمان. سیستم ناوبری و کنترل وسایل نقلیه را می توان با یک انسان مقایسه کرد (به این ترتیب که دست و پا انسان در حکم عملگرهای سیستم کنترل، مغز انسان در حکم سیستم هدایت و ناوبری و حواس انسان در حکم سنسورهای موقعیت یابی باشد) انسان با استفاده از حواس خود موقعیت خود را درک می کند. با استفاده از پردازش این اطلاعات توسط مغز، متناسب با کاری که باید انجام شود فرامین لازم را به دست و پا به عنوان ورودی های سیگنال کنترلی می دهد. نهایتا دست و پا کار خاصی را انجام می دهند تا انسان به هدف نهایی خود برسد. یکی از بزرگترین مشکلات در ربات های متحرک برآورد موقعیت ربات در فضای کاری می باشد. بدین منظور باید ساختمان ربات، عوامل مؤثر در حرکت و محیط حرکت را به طور کامل مورد بررسی قرار داد. با توجه به اهمیت و کاربرد ربات های متحرک، موقعیت یابی این ربات ها مسأله مهمی می باشد. بدین منظور روش های گوناگونی برای موقعیت یابی ربات متحرک ارائه شده است. هریک از روش ها از ابزارهای گوناگونی برای موقعیت یابی استفاده می کنند و با توجه به استفاده از ابزارهای گوناگون دقت های متفاوتی ارائه میدهند. علاوه بر این موضوع، هزینه های هر یک از روش ها نیز به نسبت ابزارهای استفاده شده متغیر می باشد. بنابراین برای انتخاب روش موقعیت یابی باید با توجه به وسیله نقلیه و کاربرد روش مناسب را انتخاب کرد.
روش های موقعیت یابی در ربات متحرک
برای موقعیت یابی ربات های متحرک هفت نوع سیستم موقعیت یابی وجود دارد:
• ادومتری
• سیستم ناوبری اینرسی
• قطب نمای مغناطیسی
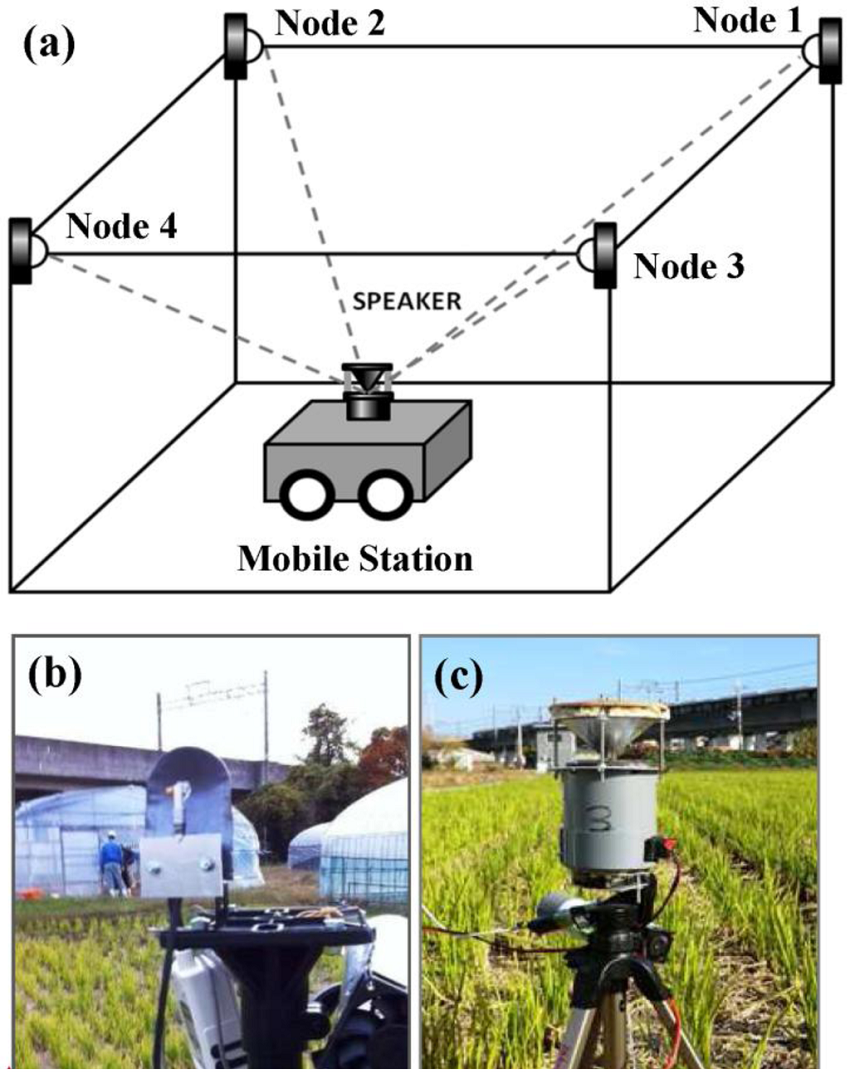
• نشانه های فعال
• سیستم موقعیت یابی جهانی
• ناوبری راهنما
• تعیین موقعیت بر اساس تطبيق مدل