
ایده یک ساختار کروی با پیشرانه درونی ایده جدیدی نیست، به طوری که در کتاب های قدیمی مکانیک به نمونه هایی از آن ها اشاره شده است. با وجود این نمی توان در مورد نمونه نخستین به قطعیت اظهار نظر کرد. برخی منابع، ربات کروی اختراع شده در سال ۱۸۹۳ توسط جان تیت را به عنوان نسخه ابتدایی در نظر می گیرند. این سیستم که جنبه تفریحی و سرگرمی داشت دارای پیشرانه فنری با شارژ دستی بود و تنها در مسیر مستقیم حرکت می کرد. این مدل در سال ۱۹۰۶ توسط آقای شورت هاوس بهبود بخشیده شد، به طوری که قابلیت حرکت در مسیر های منحنی به آن اضافه شد. طرح دیگر توسط مک فال مطرح شده است و همستربال نام دارد. همانند طرح قبلی، از مکانیزم شارژ و دشارژ فنر به عنوان محرکه اصلی استفاده می کند. فنر با آزاد کردن نیرو، باعث حرکت یک سیستم پیشرانه درونی دو چرخ شده و با به حرکت درآمدن این دو چرخ که با سطح داخلی کره در تماس است، کره به حرکت در می آید. در ادامه به بررس مکانیزم های حرکتی ربات کروی می پردازیم:
- مرکز جرم: ربات های کروی به منظور تامین نیروی پیشران و حرکت در مسیرهای دلخواه از چند طریق عمل می کنند. بیشتر ربات ها از تغییر مرکز جرم، برای حرکت خود استفاده می کنند. تاکنون روش های مختلفی برای تغییر مرکز جرم ربات، پیشنهاد شده است مانند استفاده از پاندول و تغییر مکان وزنه به عنوان مکانیزم داخلی و تغییر شکل سیستم.
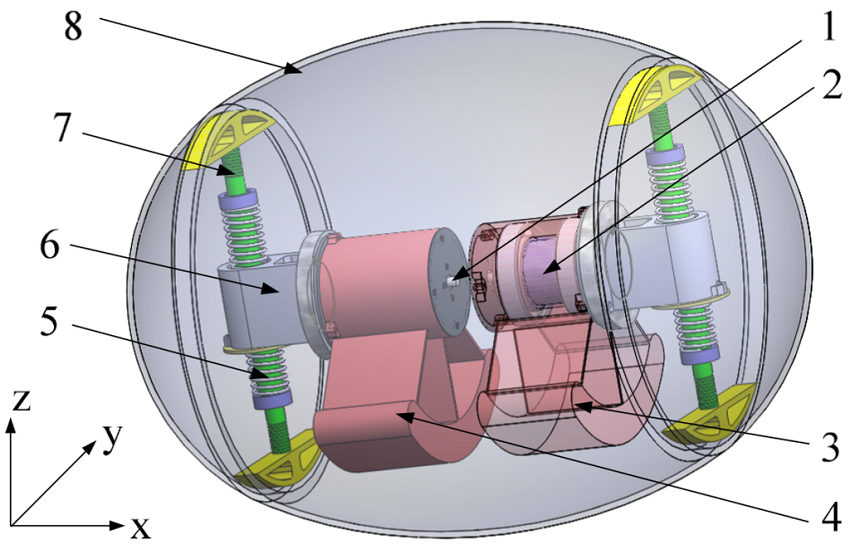
- تغییر ممنتوم زاویه ای: در این دسته ربات ها گشتاور پیشران به کمک تغییر ممنتوم زاویه ای مجموعه، با توجه به قانون بقای ممنتوم زاویه ای، به دست می آید. این ربات ها معمولاً از دو تا چند موتور برای تغییر اندازه حرکت داخلی استفاده می کنند ولی معمولاً کارایی بالایی نداشته و از سرعت کمی برخوردارند.
- اثر ژیروسکوپی: در برخی از ربات های کروی، از اثر ژیروسکوپی جرمی که در داخل ربات حرکت دورانی دارد، برای ایجاد تعادل ربات استفاده می شود. تفاوت این ربات ها با ربات های پاندولی در عامل فرماندهی و تغییر مسیر ربات می باشد.
- اثر نیروی باد: اکتشافات فضایی یکی از کاربردهای ربات متحرک می باشد. یکی از مهمترین مسائلی که در بحث استفاده از ربات در زمینه اکتشافات فضایی مطرح می باشد، مسئله ذخیره انرژی و استفاده بهینه از آن می باشد. ربات های کروی به دلیل داشتن سطح تماسی نقطه ای و اصطکاک ناچیز می توانند یکی از الویت های تحقیقاتی در این زمینه باشند.