
کشف و رديابي اشياي متحرک گامي اساسي در تجزيه و تحليل ويدئو مي باشد و از اين رو به طور گسترده اي در سيستم هاي بينايي ماشين مانند سيستم هاي نظارتي، کنترل ترافيک، ناوبري خودکار، تعامل انسان با کامپيوتر و روباتيک استفاده مي شود، زيرا سيستم هاي مذکور نيازمند دريافت و پردازش ويدئوهاي از محيط اطراف خود و در نهايت تجزيه و تحليل رفتار و رخدادهاي موجود در اين ويدئوها مي باشند. از آنجايي که دقت و سرعت از عوامل مهم در عملکرد مطلوب سيستم هاي مذکور مي باشند در نتيجه ارائه روش هايي براي رديابي اشياي متحرک که داراي زمان مصرفي کم و دقت بالا باشند منجر به اافزايش سطح کيفيت عملکرد اين سيستم ها خواهد شد. رديابي اشياي متحرک، دنبال کردن مسير حرکت يک شي يا اشياي متحرک در دنباله اي از تصاوير ورودي است. اشياي متحرک مورد رديابي مي تواند هر شي متحرکي مانند ماهي درون آب، قايق درون دريا، عابر پياده در پياده رو، اتومبيل در بزرگراه ها و غيره باشد که بر اساس کاربرد نيامند به تعيين مکان آنها هستيم. به عنوان مثال در يک سيستم ناوبري خودکار ( اتومبيل بدون راننده) بايد بتوان اشياي متحرک موجود در اطراف سيستم را تشخيص داده و در هر زمان موقعيت اين اشيا را براي اجتناب از برخورد با ديگر اشيا تعيين کرد. الگوريتم هاي رديابي بايد بتوانند در مقابل چالش هاي زيادي مانند تغييرات شدت روشنايي محيط، تغيير جهت ناگهاني اشيا، وجود انواع مختلف اشيا در حوزه ديد دوربين، همپوشاني و غيره از خود انعطاف نشان دهند.
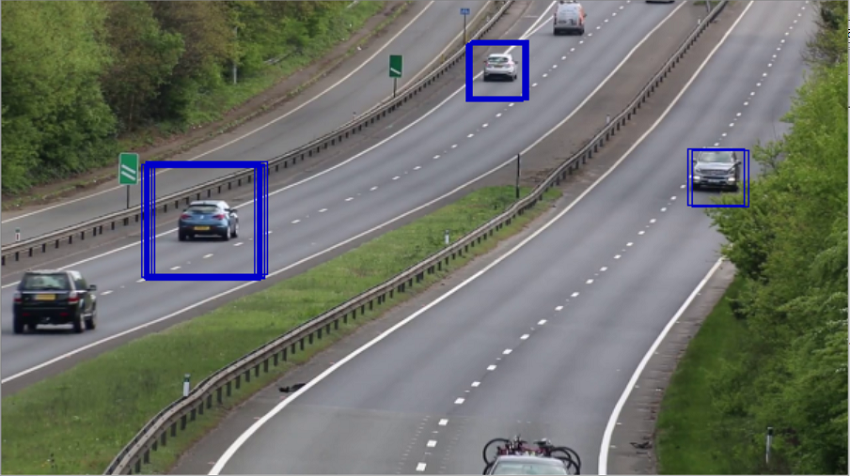
براي رديابي دقيق، مکان اشياي متحرک موجود در حوزه ديد دوربين را در هر مرحله و با استفاده از اطلاعات حرکت موجود بين دو فريم متوالي شامل فريم قبلي و فريم جاري از نظر زماني تعيين مي کنيم. در هر مرحله نقاط ويژگي Sift را روي فريم قبلي استخراج کرده و تناظر اين نقاط ويژگي را با استفاده از الگوريتم تناظريابي نقاط کليدي KLT روي فريم جاري به دست مي آوريم. در ادامه و با در اختيار داشتن نقاط ويژگي متناظر بين دو فريم متوالي، اندازه حرکت نقاط ويژگي را محاسبه کرده و با حذف نقاط ويژگي با جابه جايي ثابت و يا ناچيز، نقاط ويژگي مرتبط به اشياي متحرک را کشف خواهيم کرد. سپس نقاط ويژگي برچسب گذاري شده به عنوان اشياي متحرک را با استفاده از الگوريتم خوشه بندي DBSCAN به خوشه هاي مختلف به عنوان اشياي متحرک دسته بندي مي کنيم. با اين روش و در هر لحظه مکان تمامي اشياي متحرک موجود در حوزه ديد دوربين به دست آمده که با تناظريابي يک به يک بين اين اشيا و اشياي به دست آمده در فريم قبلي مکان جديد هر شي ء را تعيين مي کنيم. نتايج حاکي از دقت بالا و زمان مصرفي قابل قبول براي رديابي اشياي متحرک مي باشد. اين روش داراي دقت ۹۵% براي رديابي اشياي متحرک بوده و در هر ثانيه ۳۳ فريم را پردازش مي کند که در مقايسه با روش هاي معمول از نظر دقت و سرعت عملکرد مطلوبي دارد.